
Самый маленький в мире летающий робот способен поражать цели
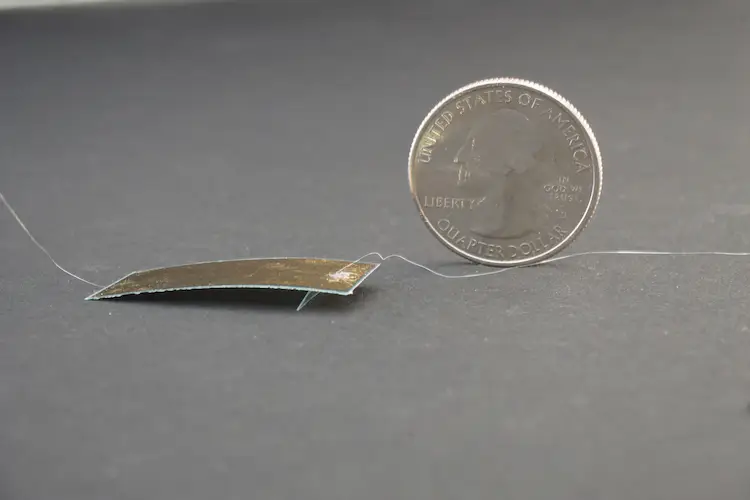
Инженеры из Калифорнийского университета в Беркли создали удивительно миниатюрного робота-летуна. Подобно шмелю, он может переноситься с цветка на цветок, зависать в воздухе, менять траекторию и даже поражать небольшие цели. Устройство диаметром менее 1 сантиметра весит всего 21 миллиграмм, что делает его самым маленьким в мире беспроводным роботом, способным к управляемому полёту.
Профессор машиностроения Ливэй Лин заявил, что новым летающим роботом можно управлять по беспроводной сети. В итоге тот будет подлетать к заданной цели и отрабатывать по ней, имитируя, например, механизм опыления, когда пчела собирает нектар и улетает. Только лишь механизм опыления?
Чтобы робот-шмель мог летать, он должен быть оснащён источником питания, например аккумулятором, и электроникой для управления полётом. И то, и другое бывает сложно встроить в очень маленькие изделия. Чтобы решить проблему, Лин и его коллеги использовали внешнее магнитное поле для питания и управления полётом.
Робот выглядит как небольшой пропеллер и оснащён двумя маленькими магнитами. Под воздействием внешнего магнитного поля они притягиваются и отталкиваются, заставляя пропеллер вращаться. Так создаётся достаточная подъёмная сила, чтобы робот взвился над землёй. Траекторией полёта можно управлять с точностью, изменяя силу магнитного поля.

Испытания показали, что прототип диаметром 9,4 мм не ломался при столкновениях, например, со стенками лабораторной камеры, сохраняя лётные качества. Как правило, отклонения угла тангажа (килевой качки) при этом было в пределах 23 градусов, так что его всегда было можно выровнять.
Соавтор исследования Фанпин Суй сказал, что миниатюрных роботов-летунов можно использовать для искусственного опыления или осмотра тесных пространств, например, трубопроводов.
Правда, пока что новинка способна лишь к пассивному полёту. Это означает, что, в отличие от самолётов или дронов, у него нет бортовых датчиков для определения текущего местоположения или траектории, и он не может корректировать свои движения в реальном времени. Таким образом, хотя робот способен летать по точным траекториям, внезапное изменение окружающей среды, тот же сильный ветер, могут сбить его с курса.
Но аспирант Вэй Юэ, соавтор исследования, пообещал, что в будущем машиностроители из Беркли постараются добавить активное управление, которое позволит менять положение робота в реальном времени, то бишь рулить им, как угодно.
Для управления роботом также требуется сильное магнитное поле, создаваемое электромагнитной катушкой. Однако дальнейшее уменьшение робота до менее чем 1 мм в диаметре — примерно до размеров москита — может сделать его достаточно лёгким, чтобы им можно было управлять с помощью гораздо более слабых магнитных полей, например, создаваемых радиоволнами.
Помимо нового робота, вдохновлённого шмелями, команда Линя также создала робота, вдохновлённого тараканами, который может ползать по полу и уцелеет, если на него наступить. Устройство не выглядит, как таракан, это лишь прямоугольник размером с насекомое, но он передвигается со скоростью таракана и может выдержать вес человека, в отличие от настоящего таракана.
А Юэ отдельно трудится над новыми «роями» (группами) роботов, которые могут работать сообща, как муравьи, над задачами, непосильными для одного такого устройства. Инженер объяснил, что занимается роботами длиной 5 мм, которые могут ползать, ехать и вращаться, а также функционировать в команде, объединяясь в цепочки и массивы. Он считает, что они были бы полезны в хирургии, формируя стенты (расширители), удаляя тромбы или выполняя другие задачи.
А из головы всё не выходит фраза из вузовской публикации со словами hit small targets — «поражать небольшие цели».
Профессор машиностроения Ливэй Лин заявил, что новым летающим роботом можно управлять по беспроводной сети. В итоге тот будет подлетать к заданной цели и отрабатывать по ней, имитируя, например, механизм опыления, когда пчела собирает нектар и улетает. Только лишь механизм опыления?
Чтобы робот-шмель мог летать, он должен быть оснащён источником питания, например аккумулятором, и электроникой для управления полётом. И то, и другое бывает сложно встроить в очень маленькие изделия. Чтобы решить проблему, Лин и его коллеги использовали внешнее магнитное поле для питания и управления полётом.
Робот выглядит как небольшой пропеллер и оснащён двумя маленькими магнитами. Под воздействием внешнего магнитного поля они притягиваются и отталкиваются, заставляя пропеллер вращаться. Так создаётся достаточная подъёмная сила, чтобы робот взвился над землёй. Траекторией полёта можно управлять с точностью, изменяя силу магнитного поля.
Испытания показали, что прототип диаметром 9,4 мм не ломался при столкновениях, например, со стенками лабораторной камеры, сохраняя лётные качества. Как правило, отклонения угла тангажа (килевой качки) при этом было в пределах 23 градусов, так что его всегда было можно выровнять.
Соавтор исследования Фанпин Суй сказал, что миниатюрных роботов-летунов можно использовать для искусственного опыления или осмотра тесных пространств, например, трубопроводов.
Правда, пока что новинка способна лишь к пассивному полёту. Это означает, что, в отличие от самолётов или дронов, у него нет бортовых датчиков для определения текущего местоположения или траектории, и он не может корректировать свои движения в реальном времени. Таким образом, хотя робот способен летать по точным траекториям, внезапное изменение окружающей среды, тот же сильный ветер, могут сбить его с курса.
Но аспирант Вэй Юэ, соавтор исследования, пообещал, что в будущем машиностроители из Беркли постараются добавить активное управление, которое позволит менять положение робота в реальном времени, то бишь рулить им, как угодно.
Для управления роботом также требуется сильное магнитное поле, создаваемое электромагнитной катушкой. Однако дальнейшее уменьшение робота до менее чем 1 мм в диаметре — примерно до размеров москита — может сделать его достаточно лёгким, чтобы им можно было управлять с помощью гораздо более слабых магнитных полей, например, создаваемых радиоволнами.
Помимо нового робота, вдохновлённого шмелями, команда Линя также создала робота, вдохновлённого тараканами, который может ползать по полу и уцелеет, если на него наступить. Устройство не выглядит, как таракан, это лишь прямоугольник размером с насекомое, но он передвигается со скоростью таракана и может выдержать вес человека, в отличие от настоящего таракана.
А Юэ отдельно трудится над новыми «роями» (группами) роботов, которые могут работать сообща, как муравьи, над задачами, непосильными для одного такого устройства. Инженер объяснил, что занимается роботами длиной 5 мм, которые могут ползать, ехать и вращаться, а также функционировать в команде, объединяясь в цепочки и массивы. Он считает, что они были бы полезны в хирургии, формируя стенты (расширители), удаляя тромбы или выполняя другие задачи.
А из головы всё не выходит фраза из вузовской публикации со словами hit small targets — «поражать небольшие цели».
- Дмитрий Ладыгин
- news.berkeley.edu
Наши новостные каналы
Подписывайтесь и будьте в курсе свежих новостей и важнейших событиях дня.
Рекомендуем для вас

Ящик Пандоры открыт: ИИ-копия погибшего… выступила в Аризоне на суде
После этого убийца получил максимальный срок. Почему это крайне опасный прецедент?...

Ловцы тепла: археологи рассказали, как древние люди сумели пережить жуткое похолодание
Цунами высотой 20 метров обрушилось на Европу, а потом настала зима длиной в 200 дней в году....

Не НЛО, не спутник: почему правительство Колумбии так хочет заполучить этот объект?
Эксперты говорят, что это одна из самых больших сенсаций за последнее время....

В 12350 году до н.э. на Земле произошел настоящий апокалипсис
Если бы эта солнечная буря случилась сейчас, то количество жертв составило бы сотни миллионов человек....

Ученые практически коснулись марсианской воды
Новейшее исследование открывает сенсационные подробности....

Ученые хотят выращивать запасные человеческие тела
Биологи обещают, что не будут включать сознание в «запчастях»....