
Смертоносное комбо: робот RAVEN получил всё лучшее от птиц, дронов и самолётов
Большинство уже известных дронов — это квадрокоптеры с винтами, которые успешно приземляются и взлетают практически в любом месте. Проблема в том, что их энергоэффективность ниже, чем у самолётов, которые гораздо дольше остаются в воздухе. Однако самолётам, чтобы оторваться от земли, необходима взлётно-посадочная полоса либо специальная пусковая установка.
Чтобы преодолеть эти ограничения и несовершенства, швейцарские исследователи из Федеральной политехнической школы Лозанны создали летающего робота с неподвижным крылом под названием RAVEN.
Название звучит и выглядит как английское слово «ворон», но заглавные буквы указывают на сокращение. Полное название Robotic Avian-inspired Vehicle for multiple ENvironments можно перевести как «вдохновлённый птицами роботизированный транспорт для различных сред». Вместо колёсных шасси — пара роботизированных лап. Главный инженер проекта Вон Дон Шин подчеркнул, что RAVEN может ходить, перепрыгивать через препятствия и взлетать, как настоящие птицы.
Против идеи приделать дронам лапы было два веских довода: рост массы и усложнение конструкции. Громоздкие и тяжёлые ноги современных роботов не подходили в принципе, так как задумывались для наземных устройств. Поэтому Шин с сотрудниками начали свой проект с изучения вопроса о массе ног у разных видов птиц.
Оказалось, что у пернатых соотношение массы нижних конечностей к их весу в целом пропорционально росту. (Кстати, понятие «птичьи лапы» не подразумевают всей нижней конечности, которая состоит у пернатых из пяти основных элементов, начиная от бедра и заканчивая пальцами, поэтому позволим себе здесь употреблять слово «ноги»). В общем, инженеры выяснили, что у ворона ноги весят около 100 г, что и взяли за точку отсчёта.
Роботизированные ноги, созданные группой Шина, очень похожи на настоящие птичьи. Для снижения веса пришлось пойти на упрощения: исключили суставы коленей и пальцев. В результате получилась конечность всего из двух сегментов, 64% веса которой пришлось на тазобедренный сустав.
Весь механизм приводит в движение носовой пропеллер, причём типичный, как у коптера. А вот голеностоп двигается с помощью системы шкивов и зубчатого ремня. Роботизированная нога заканчивается ступнёй с тремя пальцами, направленными вперёд, а один глядит назад.
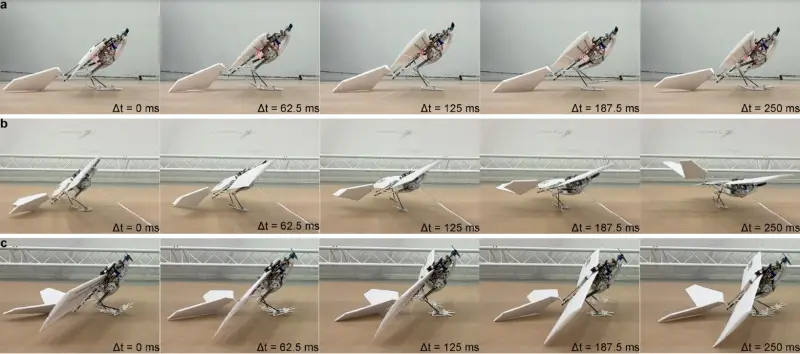
Сравнение ходьбы с различными конструкциями стоп: в окончательной версии, без отдельного заднего пальца и с фиксированными пальцами
Однако конструкторы не только упрощали строение. От птиц взяли идею сложных конструктивных особенностей.
Шин встроил торсионную (спиральную) пружину в голеностопный сустав. Сгибаясь, нога робота накапливает энергию в пружине, а при выпрямлении пружина в сочетании с двигателем повышает скорость прыжка на целую четверть.
— Шин.
В итоге роботизированные ноги весили около 230 г, намного больше, чем у среднестститического ворона. Но и этого хватило, чтобы RAVEN мог ходить, прыгать, подниматься в воздух и летать.
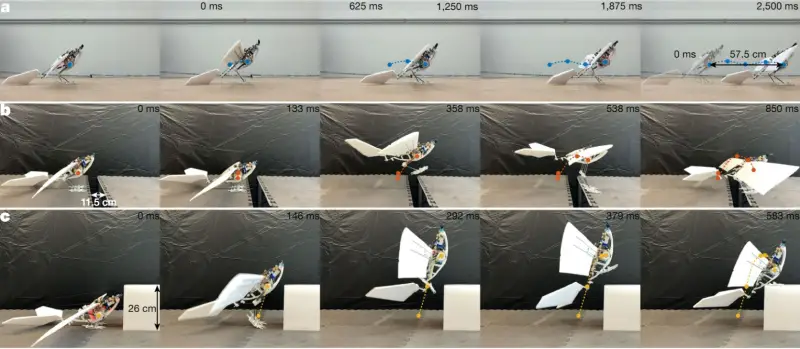
Инженеры рассчитали необходимую скорость взлёта для двух птиц — с массой тела 490 г и чуть более 780 г: 1,85 м и 3,21 м в секунду соответственно. Исходя из этого, Шин подсчитал, что роботу «Ворон» для взлёта необходима скорость 2,5 м/с. При манере взлёта, как у птиц, он мог бы достичь этой скорости всего за 0,17 с. Два других подхода включали сброс с возвышенности, по типу мотодельтаплана, либо отрыв от земли за счёт винтов, как у коптера.
Покадровая съёмка наземных движений «Ворона»
Под энергоэффективностью создатели понимали соотношение потребляемой и вырабатываемой энергии. Вырабатываемая энергия — это кинетическая и потенциальная энергия в момент взлёта, когда ноги перестают касаться земли. Потребляемая энергия рассчитывалась путём измерения мощности, используемой во время взлёта. В итоге выяснилось, что взлетать по-птичьи — выгоднее всего!
— Шин.
Затраты энергии при взлёте с помощью прыжка были немного выше, чем при использовании двух других стратегий, но несущественными образом. Для этого требовалось на 6,9% больше энергии, чем при взлёте со сбрасыванием вниз, и на 7,9% больше, чем при взлёте с места. Но в смысле затрат энергии «припрыжка» обеспечивала куда более высокое ускорение за счёт отдачи. В целом, прыжок с помощью «птичьих ног» был в 9,7 раз эффективнее, чем взлёт с места, и в 4,9 раза эффективнее, чем при полёте после сброса с возвышенности.
Чтобы доказать универсальность летающего робота с ногами, команда Шина поставила перед ним ряд задач, невыполнимых для типичного дрона. Так, RAVEN должен был пройти через помещение с низким потолком, перепрыгнуть через проём и заскочить на препятствие. В задранном положении, то есть касаясь хвостом земли, робот мог устойчиво ходить даже без контроллеров (устройств управления).
Ходьба решила проблему передвижения под низкими сводами. Для перепрыгивания через проёмы и препятствия пригодился тот же механизм, что и для взлёта: торсионные пружины и приводы. RAVEN мог перепрыгнуть через проём шириной 11 см и через препятствие высотой 26 см.
Но Шин признал, что потрудиться над «Вороном» предстоит ещё много, прежде чем новинка станет по-настоящему примечательной. Так, робот пока что не может преодолеть все препятствия за один раз — под каждую задачу его надо перепрограммировать по отдельности.
Проблема в том, что система управления ещё не адаптивна. Это означает, что приводы в ногах следуют заранее заданным алгоритмам движений, чтобы направить робота по траектории, которую инженеры рассчитали с помощью компьютерного моделирования. В общем, встретив на пути незапланированное препятствие, нынешний RAVEN в него врежется.
Другая проблема — RAVEN не может приземляться на ноги. Вот почему инженеры хотят встроить несколько датчиков, как для восприятия картинки, так и тактильные. Благодаря им «Ворон» будет в точности знать, где именно место посадки.
Ещё одна модификация, которая появится у несовершенной концепции — это складные крылья, чтобы робот мог протискиваться в узкие пространства. К тому же машущие крылья очень важны и для посадки, потому что птицы замедляют полёт в первую очередь за счёт них.
— Шин.
Разработчики утверждают, что готовят своё детище для участия в поисково-спасательных операциях. Идея состоит в том, что летающие роботы с ногами смогут быстро добираться до пострадавших от стихийных бедствий: приземляться, при необходимости преодолевать сложный рельеф пешком, а затем взлетать, как птицы.
Ещё одно возможное применение — доставка посылок. В Швейцарии инженеры часто видели, как вертолёты доставляют почту живущим высоко в горах. Дрон, похожий на птицу, мог бы делать это гораздо дешевле.
Успехи робототехники вызывают и восхищение, и тревогу. Причём пугающий аспект не зависит от создателей новинки. Когда «Ворон» будет уже близок к совершенству, купившие его сами будут решать, что доставлять — почту, еду или боеприпасы.
Чтобы преодолеть эти ограничения и несовершенства, швейцарские исследователи из Федеральной политехнической школы Лозанны создали летающего робота с неподвижным крылом под названием RAVEN.
Название звучит и выглядит как английское слово «ворон», но заглавные буквы указывают на сокращение. Полное название Robotic Avian-inspired Vehicle for multiple ENvironments можно перевести как «вдохновлённый птицами роботизированный транспорт для различных сред». Вместо колёсных шасси — пара роботизированных лап. Главный инженер проекта Вон Дон Шин подчеркнул, что RAVEN может ходить, перепрыгивать через препятствия и взлетать, как настоящие птицы.
Против идеи приделать дронам лапы было два веских довода: рост массы и усложнение конструкции. Громоздкие и тяжёлые ноги современных роботов не подходили в принципе, так как задумывались для наземных устройств. Поэтому Шин с сотрудниками начали свой проект с изучения вопроса о массе ног у разных видов птиц.
Оказалось, что у пернатых соотношение массы нижних конечностей к их весу в целом пропорционально росту. (Кстати, понятие «птичьи лапы» не подразумевают всей нижней конечности, которая состоит у пернатых из пяти основных элементов, начиная от бедра и заканчивая пальцами, поэтому позволим себе здесь употреблять слово «ноги»). В общем, инженеры выяснили, что у ворона ноги весят около 100 г, что и взяли за точку отсчёта.
Роботизированные ноги, созданные группой Шина, очень похожи на настоящие птичьи. Для снижения веса пришлось пойти на упрощения: исключили суставы коленей и пальцев. В результате получилась конечность всего из двух сегментов, 64% веса которой пришлось на тазобедренный сустав.
Весь механизм приводит в движение носовой пропеллер, причём типичный, как у коптера. А вот голеностоп двигается с помощью системы шкивов и зубчатого ремня. Роботизированная нога заканчивается ступнёй с тремя пальцами, направленными вперёд, а один глядит назад.
Сравнение ходьбы с различными конструкциями стоп: в окончательной версии, без отдельного заднего пальца и с фиксированными пальцами
Однако конструкторы не только упрощали строение. От птиц взяли идею сложных конструктивных особенностей.
Шин встроил торсионную (спиральную) пружину в голеностопный сустав. Сгибаясь, нога робота накапливает энергию в пружине, а при выпрямлении пружина в сочетании с двигателем повышает скорость прыжка на целую четверть.
Птицы могут накапливать энергию в своей мышечно-суставной системе во время сгибания и очень быстро высвобождать её во время разгибания для прыжка.
Задача пружины состояла в том, чтобы имитировать этот механизм, что и сработало, причём неплохо. На самом деле это увеличило скорость прыжка на 25 процентов
Задача пружины состояла в том, чтобы имитировать этот механизм, что и сработало, причём неплохо. На самом деле это увеличило скорость прыжка на 25 процентов
— Шин.
В итоге роботизированные ноги весили около 230 г, намного больше, чем у среднестститического ворона. Но и этого хватило, чтобы RAVEN мог ходить, прыгать, подниматься в воздух и летать.
Инженеры рассчитали необходимую скорость взлёта для двух птиц — с массой тела 490 г и чуть более 780 г: 1,85 м и 3,21 м в секунду соответственно. Исходя из этого, Шин подсчитал, что роботу «Ворон» для взлёта необходима скорость 2,5 м/с. При манере взлёта, как у птиц, он мог бы достичь этой скорости всего за 0,17 с. Два других подхода включали сброс с возвышенности, по типу мотодельтаплана, либо отрыв от земли за счёт винтов, как у коптера.
Покадровая съёмка наземных движений «Ворона»
Под энергоэффективностью создатели понимали соотношение потребляемой и вырабатываемой энергии. Вырабатываемая энергия — это кинетическая и потенциальная энергия в момент взлёта, когда ноги перестают касаться земли. Потребляемая энергия рассчитывалась путём измерения мощности, используемой во время взлёта. В итоге выяснилось, что взлетать по-птичьи — выгоднее всего!
Оказалось, что взлетать вприпрыжку — самая энергоэффективная стратегия. Это было довольно неожиданно
— Шин.
Затраты энергии при взлёте с помощью прыжка были немного выше, чем при использовании двух других стратегий, но несущественными образом. Для этого требовалось на 6,9% больше энергии, чем при взлёте со сбрасыванием вниз, и на 7,9% больше, чем при взлёте с места. Но в смысле затрат энергии «припрыжка» обеспечивала куда более высокое ускорение за счёт отдачи. В целом, прыжок с помощью «птичьих ног» был в 9,7 раз эффективнее, чем взлёт с места, и в 4,9 раза эффективнее, чем при полёте после сброса с возвышенности.
Чтобы доказать универсальность летающего робота с ногами, команда Шина поставила перед ним ряд задач, невыполнимых для типичного дрона. Так, RAVEN должен был пройти через помещение с низким потолком, перепрыгнуть через проём и заскочить на препятствие. В задранном положении, то есть касаясь хвостом земли, робот мог устойчиво ходить даже без контроллеров (устройств управления).
Ходьба решила проблему передвижения под низкими сводами. Для перепрыгивания через проёмы и препятствия пригодился тот же механизм, что и для взлёта: торсионные пружины и приводы. RAVEN мог перепрыгнуть через проём шириной 11 см и через препятствие высотой 26 см.
Но Шин признал, что потрудиться над «Вороном» предстоит ещё много, прежде чем новинка станет по-настоящему примечательной. Так, робот пока что не может преодолеть все препятствия за один раз — под каждую задачу его надо перепрограммировать по отдельности.
Проблема в том, что система управления ещё не адаптивна. Это означает, что приводы в ногах следуют заранее заданным алгоритмам движений, чтобы направить робота по траектории, которую инженеры рассчитали с помощью компьютерного моделирования. В общем, встретив на пути незапланированное препятствие, нынешний RAVEN в него врежется.
Другая проблема — RAVEN не может приземляться на ноги. Вот почему инженеры хотят встроить несколько датчиков, как для восприятия картинки, так и тактильные. Благодаря им «Ворон» будет в точности знать, где именно место посадки.
Ещё одна модификация, которая появится у несовершенной концепции — это складные крылья, чтобы робот мог протискиваться в узкие пространства. К тому же машущие крылья очень важны и для посадки, потому что птицы замедляют полёт в первую очередь за счёт них.
Когда RAVEN захлопает крыльями, это будет настоящий робот-птица
— Шин.
Разработчики утверждают, что готовят своё детище для участия в поисково-спасательных операциях. Идея состоит в том, что летающие роботы с ногами смогут быстро добираться до пострадавших от стихийных бедствий: приземляться, при необходимости преодолевать сложный рельеф пешком, а затем взлетать, как птицы.
Ещё одно возможное применение — доставка посылок. В Швейцарии инженеры часто видели, как вертолёты доставляют почту живущим высоко в горах. Дрон, похожий на птицу, мог бы делать это гораздо дешевле.
Успехи робототехники вызывают и восхищение, и тревогу. Причём пугающий аспект не зависит от создателей новинки. Когда «Ворон» будет уже близок к совершенству, купившие его сами будут решать, что доставлять — почту, еду или боеприпасы.
- Дмитрий Ладыгин
- nature.com
Наши новостные каналы
Подписывайтесь и будьте в курсе свежих новостей и важнейших событиях дня.
Рекомендуем для вас

Ящик Пандоры открыт: ИИ-копия погибшего… выступила в Аризоне на суде
После этого убийца получил максимальный срок. Почему это крайне опасный прецедент?...

Ловцы тепла: археологи рассказали, как древние люди сумели пережить жуткое похолодание
Цунами высотой 20 метров обрушилось на Европу, а потом настала зима длиной в 200 дней в году....

Не НЛО, не спутник: почему правительство Колумбии так хочет заполучить этот объект?
Эксперты говорят, что это одна из самых больших сенсаций за последнее время....

В 12350 году до н.э. на Земле произошел настоящий апокалипсис
Если бы эта солнечная буря случилась сейчас, то количество жертв составило бы сотни миллионов человек....

Ученые практически коснулись марсианской воды
Новейшее исследование открывает сенсационные подробности....

Ученые хотят выращивать запасные человеческие тела
Биологи обещают, что не будут включать сознание в «запчастях»....

Палеонтология от Gucci: в продажу скоро поступят сумки и кошельки… из кожи тираннозавров
Почему маркетологи потирают руки, а серьезные ученые не могут сдержать улыбку?...