
«Человеческая» нервная система успешно «рулит» целым роем роботов
Группы слаженно двигающихся роботов часто называют роями, по аналогии с пчёлами. Создание таких роёв привлекает робототехников, так как обещает на практике повышенную скорость и эффективность. А это крайне важно, когда, например, нужно спасти пострадавших от стихийных бедствий или вести мониторинг территорий после аварии на химическом производстве.
Исследователи из Свободного университета Брюсселя (ULB) разработали для этого фреймворк, то есть программную платформу, которая определяет организацию роботов. Новую роевую архитектуру создавали по примеру нервной системой человека с целью улучшить взаимодействие между роботами. Эксперименты с новыми алгоритмами показали, что роботы благодаря им организуются в подгруппы. И это улучшает координацию, когда вся группа исследует окружающую среду, перемещается или планирует дальнейшие действия.
— Мэри Кэтрин Генрих, сотрудница лаборатории искусственного интеллекта в ULB.
Связана такая заминка с тем, что у методов самоорганизации машин остаются существенные недостатки. Очень непросто запрограммированного индивидуально робота объединить с другими устройствами в слаженную эффективную группу.
Суть новой платформы — в создании и восстановлении самоорганизующихся иерархий. Иначе говоря, придуманный в ULB фреймворк помогает роботам самостоятельно сплачиваться в сеть с динамическим (переменчивым) управлением. Создатели назвали своё достижение самоорганизующейся нервной системой (SoNS).
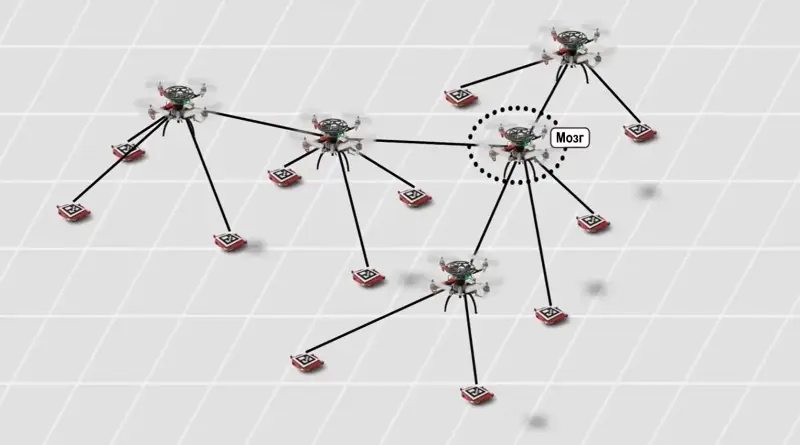
При объединении в сеть роботы временно и по очереди берут на себя определённые задачи в непостоянной иерархии руководства, схожей с подчинённостью элементов в человеческой нервной системе. Верховное звено в роевой иерархии — «мозг», который контролирует группу во время задания.
Генрих пояснила, что в сети SoNS каждое устройство вступает во взаимодействие лишь с ближайшими роботами. И это позволяет избежать недостатков, которые возможны при централизации.
По мере необходимости пакеты информации с датчиков могут объединяться для передачи вверх по иерархии. А если смотреть сверху вниз, от «мозга» к остальным составляющим, то руководящие сообщения могут разделяться по мере передачи «вниз по течению». При этом равновесие между индивидуальным и коллективным типами поведения способно активно отлаживаться.
Роевая архитектура SoNS действует как своего рода «промежуточное программное обеспечение» для роботов. При этом алгоритмы «организации труда» позволяют отдельным устройствам объединяться в динамические иерархии. В складывающейся по мере необходимости сети роботы могут оптимально задействовать свои возможности ради успеха поставленной задачи.
— профессор Марко Дориго, ULB.
Генрих и Дориго с другими коллегами протестировали своё ПО сначала в компьютерной симуляции с 250 летающими коптерами и наземными роботами, а затем в экспериментах с реальными устройствами. Результаты опытов подтвердили: с новым подходом удаётся координировать действия множества машин ещё эффективнее.
Разработчики верят, что их достижение в итоге улучшит применение робототехнических роёв в реальных условиях.
Исследователи из Свободного университета Брюсселя (ULB) разработали для этого фреймворк, то есть программную платформу, которая определяет организацию роботов. Новую роевую архитектуру создавали по примеру нервной системой человека с целью улучшить взаимодействие между роботами. Эксперименты с новыми алгоритмами показали, что роботы благодаря им организуются в подгруппы. И это улучшает координацию, когда вся группа исследует окружающую среду, перемещается или планирует дальнейшие действия.
За последние пару десятилетий роевая робототехника далеко продвинулась в организации коллективных действий без центрального «мозга». Однако пока рои роботов ещё не начали широко применять в реальных ситуациях
— Мэри Кэтрин Генрих, сотрудница лаборатории искусственного интеллекта в ULB.
Связана такая заминка с тем, что у методов самоорганизации машин остаются существенные недостатки. Очень непросто запрограммированного индивидуально робота объединить с другими устройствами в слаженную эффективную группу.
Суть новой платформы — в создании и восстановлении самоорганизующихся иерархий. Иначе говоря, придуманный в ULB фреймворк помогает роботам самостоятельно сплачиваться в сеть с динамическим (переменчивым) управлением. Создатели назвали своё достижение самоорганизующейся нервной системой (SoNS).
При объединении в сеть роботы временно и по очереди берут на себя определённые задачи в непостоянной иерархии руководства, схожей с подчинённостью элементов в человеческой нервной системе. Верховное звено в роевой иерархии — «мозг», который контролирует группу во время задания.
Генрих пояснила, что в сети SoNS каждое устройство вступает во взаимодействие лишь с ближайшими роботами. И это позволяет избежать недостатков, которые возможны при централизации.
По мере необходимости пакеты информации с датчиков могут объединяться для передачи вверх по иерархии. А если смотреть сверху вниз, от «мозга» к остальным составляющим, то руководящие сообщения могут разделяться по мере передачи «вниз по течению». При этом равновесие между индивидуальным и коллективным типами поведения способно активно отлаживаться.
Роевая архитектура SoNS действует как своего рода «промежуточное программное обеспечение» для роботов. При этом алгоритмы «организации труда» позволяют отдельным устройствам объединяться в динамические иерархии. В складывающейся по мере необходимости сети роботы могут оптимально задействовать свои возможности ради успеха поставленной задачи.
На основе SoNS у роботов получается координировать коллективные действия для сбора данных, запуска механизмов и принятия решений, не жертвуя гибкостью и стабильностью всего роя.
Иначе говоря, архитектура SoNS даёт возможность программировать группу устройств как всего лишь одного робота
Иначе говоря, архитектура SoNS даёт возможность программировать группу устройств как всего лишь одного робота
— профессор Марко Дориго, ULB.
Генрих и Дориго с другими коллегами протестировали своё ПО сначала в компьютерной симуляции с 250 летающими коптерами и наземными роботами, а затем в экспериментах с реальными устройствами. Результаты опытов подтвердили: с новым подходом удаётся координировать действия множества машин ещё эффективнее.
Разработчики верят, что их достижение в итоге улучшит применение робототехнических роёв в реальных условиях.
- Дмитрий Ладыгин
- science.org
Наши новостные каналы
Подписывайтесь и будьте в курсе свежих новостей и важнейших событиях дня.
Рекомендуем для вас

Ящик Пандоры открыт: ИИ-копия погибшего… выступила в Аризоне на суде
После этого убийца получил максимальный срок. Почему это крайне опасный прецедент?...

Ловцы тепла: археологи рассказали, как древние люди сумели пережить жуткое похолодание
Цунами высотой 20 метров обрушилось на Европу, а потом настала зима длиной в 200 дней в году....

Не НЛО, не спутник: почему правительство Колумбии так хочет заполучить этот объект?
Эксперты говорят, что это одна из самых больших сенсаций за последнее время....

В 12350 году до н.э. на Земле произошел настоящий апокалипсис
Если бы эта солнечная буря случилась сейчас, то количество жертв составило бы сотни миллионов человек....

Ученые практически коснулись марсианской воды
Новейшее исследование открывает сенсационные подробности....

Ученые хотят выращивать запасные человеческие тела
Биологи обещают, что не будут включать сознание в «запчастях»....