
Более быстрый метод обучения роботов испытали на унитазе
Исследователи из Имперского колледжа Лондона и Лаборатории обучения роботов компании Dyson представили метод Render and Diffuse (R&D), то есть «Визуализация и распространение». Так они назвали подход, который объединяет в роботизированной системе низкоуровневые (простые) действия и изображения в формате RBG с использованием виртуальной трёхмерной визуализации.
Утверждается, что представленный метод может в конечном итоге облегчить процесс обучения роботов новым навыкам. А также сократить огромное количество обучающих демонстраций с помощью человека, как того пока ещё требуют многие существующие технологии.
Ведущий автор разработки — Виталис Восилиус, аспирант Имперского колледжа Лондона. Во время стажировки в Dyson он занимался упрощением задач по обучению роботов, позволив устройствам более эффективно прогнозировать нужные действия.
Метод R&D позволяет роботам «представлять» свои действия на основе картинок, используя виртуальные рендеры, то есть преобразования трёхмерной модели из компьютерной программы в изображение.
Иными словами, используя широко доступные 3D-модели роботов и методы рендеринга, можно значительно упростить приобретение новых навыков устройствами, а также существенно снизить требования к объёму данных для обучения.
Итак, чтобы робот выполнил новую задачу, ему сначала необходимо спрогнозировать действия, которые он должен совершить, на основе изображений, получаемых датчиками. Метод R&D, по сути, позволяет роботам более эффективно соотносить изображения и действия.
Как следует из названия, новый подход состоит из двух основных этапов, объяснил Восилиус. Во-первых, устройство «воображает» свои действия практически так же, как воспринимает окружающую среду. Для этого происходит визуализация (отображение) момента, в котором он оказался бы, если бы выполнял определённые действия. Во-вторых, происходит уточнение эти воображаемых действий, что в конечном итоге приводит к последовательности реальных движений для выполнения задачи.
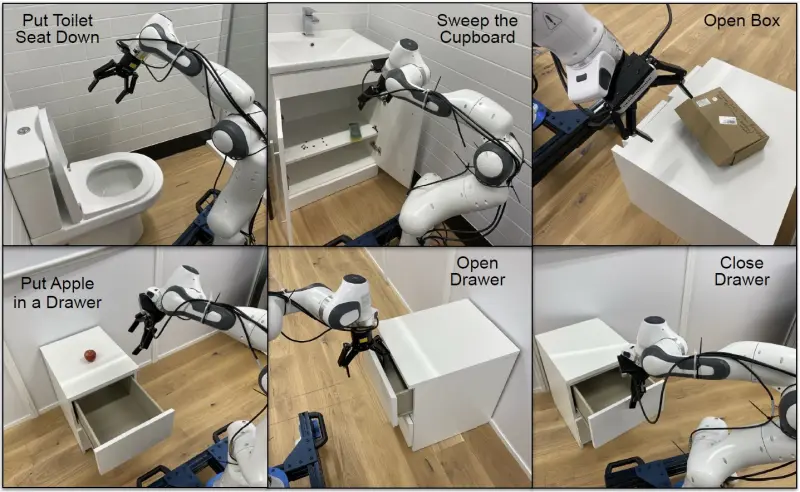
Исследователи оценили свой метод в серии компьютерных симуляций и обнаружили, что добились оптимизации. Затем убедились в том, что избрали верный путь, испытав реального физического робота при выполнении им шести повседневных задач. Робот опускал сиденье унитаза, наводил порядок в шкафу, открывал картонную коробку, укладывал яблоко в тумбочку, открывая и закрывая её.
В конечном счёте, исследователи упростили алгоритм обучения и теперь рассчитывают применить свой подход в программных продуктах для прочей робототехники.
Утверждается, что представленный метод может в конечном итоге облегчить процесс обучения роботов новым навыкам. А также сократить огромное количество обучающих демонстраций с помощью человека, как того пока ещё требуют многие существующие технологии.
Ведущий автор разработки — Виталис Восилиус, аспирант Имперского колледжа Лондона. Во время стажировки в Dyson он занимался упрощением задач по обучению роботов, позволив устройствам более эффективно прогнозировать нужные действия.
Метод R&D позволяет роботам «представлять» свои действия на основе картинок, используя виртуальные рендеры, то есть преобразования трёхмерной модели из компьютерной программы в изображение.
Иными словами, используя широко доступные 3D-модели роботов и методы рендеринга, можно значительно упростить приобретение новых навыков устройствами, а также существенно снизить требования к объёму данных для обучения.
Итак, чтобы робот выполнил новую задачу, ему сначала необходимо спрогнозировать действия, которые он должен совершить, на основе изображений, получаемых датчиками. Метод R&D, по сути, позволяет роботам более эффективно соотносить изображения и действия.
Как следует из названия, новый подход состоит из двух основных этапов, объяснил Восилиус. Во-первых, устройство «воображает» свои действия практически так же, как воспринимает окружающую среду. Для этого происходит визуализация (отображение) момента, в котором он оказался бы, если бы выполнял определённые действия. Во-вторых, происходит уточнение эти воображаемых действий, что в конечном итоге приводит к последовательности реальных движений для выполнения задачи.
Исследователи оценили свой метод в серии компьютерных симуляций и обнаружили, что добились оптимизации. Затем убедились в том, что избрали верный путь, испытав реального физического робота при выполнении им шести повседневных задач. Робот опускал сиденье унитаза, наводил порядок в шкафу, открывал картонную коробку, укладывал яблоко в тумбочку, открывая и закрывая её.
В конечном счёте, исследователи упростили алгоритм обучения и теперь рассчитывают применить свой подход в программных продуктах для прочей робототехники.
- Дмитрий Ладыгин
- arxiv.org/pdf/2405.18196
Наши новостные каналы
Подписывайтесь и будьте в курсе свежих новостей и важнейших событиях дня.
Рекомендуем для вас

Ящик Пандоры открыт: ИИ-копия погибшего… выступила в Аризоне на суде
После этого убийца получил максимальный срок. Почему это крайне опасный прецедент?...

Ловцы тепла: археологи рассказали, как древние люди сумели пережить жуткое похолодание
Цунами высотой 20 метров обрушилось на Европу, а потом настала зима длиной в 200 дней в году....

Не НЛО, не спутник: почему правительство Колумбии так хочет заполучить этот объект?
Эксперты говорят, что это одна из самых больших сенсаций за последнее время....

В 12350 году до н.э. на Земле произошел настоящий апокалипсис
Если бы эта солнечная буря случилась сейчас, то количество жертв составило бы сотни миллионов человек....

Ученые практически коснулись марсианской воды
Новейшее исследование открывает сенсационные подробности....

Ученые хотят выращивать запасные человеческие тела
Биологи обещают, что не будут включать сознание в «запчастях»....