
Исследователи разработали магнитных микророботов для создания объектов в трёхмерной среде
Исследователи из лаборатории хирургической робототехники Университета Твенте впервые в истории смогли заставить двух микророботов совместно выполнять различные задачи в 3D пространстве. Магнитные микророботы размером всего в 1 миллиметр успешно поднимали и передвигали объекты несмотря на проблемы с прилипанием друг к другу из-за своих магнитных свойств. У роботов, так же как и у обычных магнитов, был предел расстояния, после которого они начинали слипаться. Ученые нашли способ сделать из недостатка полезный инструмент при помощи специального контроллера.
Подобные микророботы абсолютно безопасны для человеческого организма и могут работать в труднодоступных местах, что делает их перспективными для медицинских исследований.
— Франко Пиньян Басуальдо, научный сотрудник Лаборатории хирургической робототехники, автор-корреспондент публикации.
Профессор Сартак Мисра, руководитель лаборатории, концентрирует свои усилия на разработке инновационных решений для широкого круга клинически актуальных задач, включая биомедицинскую визуализацию, автоматизацию медицинских процедур и создание микроробототехнических инструментов.
Исследования в области микроробототехники открывают перед человечеством новые горизонты и перспективы. С их помощью возможно создание революционных методов лечения и диагностики заболеваний, а также решение множества сложных задач в сфере биомедицины. На основе этой технологии можно в корне изменить подход к проведению хирургических операций и других медицинских процедур. Это шаг в будущее, где микророботы могут стать незаменимыми помощниками врачей.
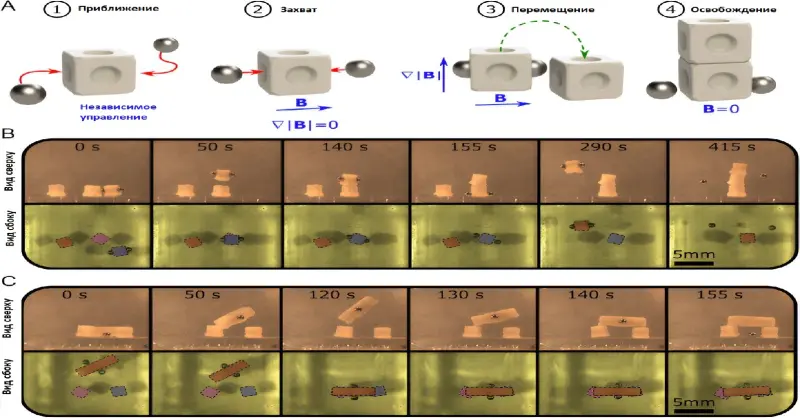
Результаты экспериментального совместного захвата и сборки. Магнитные агенты представляют собой сферы из нержавеющей стали диаметром 1 мм, а пассивные объекты — кубики размером 2 мм, напечатанные на 3D-принтере. А) Процедура состояла из четырех этапов: приближения, захвата, пермещения и освобождения. Сплошные красные стрелки показывают движение магнитных агентов, а пунктирная зеленая стрелка показывает движение предмета. B) Снимки эксперимента по захвату и укладке трех кубиков. C) Снимки захвата и укладки бруса на вершину конструкции с двумя кубиками. Пассивные объекты (кубы и балки) выделены для большей наглядности.
Исследование проводилось в рамках европейского проекта RĔGO (программа Horizon Europe), целью которого является разработка инновационного набора микроразмерных, реагирующих на стимулы, несвязанных групп роботов на базе искусственного интеллекта. Результаты были опубликованы в журнале Advanced Intelligent Systems.
Подобные микророботы абсолютно безопасны для человеческого организма и могут работать в труднодоступных местах, что делает их перспективными для медицинских исследований.
Мы можем работать с биологическими образцами удаленно и без риска их загрязнения. Такое новшество может улучшить существующие процедуры и открыть путь новым, ранее недоступным ввиду ограничений медицинских технологий
— Франко Пиньян Басуальдо, научный сотрудник Лаборатории хирургической робототехники, автор-корреспондент публикации.
Союз медицины и роботов
Профессор Сартак Мисра, руководитель лаборатории, концентрирует свои усилия на разработке инновационных решений для широкого круга клинически актуальных задач, включая биомедицинскую визуализацию, автоматизацию медицинских процедур и создание микроробототехнических инструментов.
Исследования в области микроробототехники открывают перед человечеством новые горизонты и перспективы. С их помощью возможно создание революционных методов лечения и диагностики заболеваний, а также решение множества сложных задач в сфере биомедицины. На основе этой технологии можно в корне изменить подход к проведению хирургических операций и других медицинских процедур. Это шаг в будущее, где микророботы могут стать незаменимыми помощниками врачей.
Результаты экспериментального совместного захвата и сборки. Магнитные агенты представляют собой сферы из нержавеющей стали диаметром 1 мм, а пассивные объекты — кубики размером 2 мм, напечатанные на 3D-принтере. А) Процедура состояла из четырех этапов: приближения, захвата, пермещения и освобождения. Сплошные красные стрелки показывают движение магнитных агентов, а пунктирная зеленая стрелка показывает движение предмета. B) Снимки эксперимента по захвату и укладке трех кубиков. C) Снимки захвата и укладки бруса на вершину конструкции с двумя кубиками. Пассивные объекты (кубы и балки) выделены для большей наглядности.
Исследование проводилось в рамках европейского проекта RĔGO (программа Horizon Europe), целью которого является разработка инновационного набора микроразмерных, реагирующих на стимулы, несвязанных групп роботов на базе искусственного интеллекта. Результаты были опубликованы в журнале Advanced Intelligent Systems.
- Алексей Павлов
- Advanced Intelligent Systems
Наши новостные каналы
Подписывайтесь и будьте в курсе свежих новостей и важнейших событиях дня.
Рекомендуем для вас

Ящик Пандоры открыт: ИИ-копия погибшего… выступила в Аризоне на суде
После этого убийца получил максимальный срок. Почему это крайне опасный прецедент?...

Ловцы тепла: археологи рассказали, как древние люди сумели пережить жуткое похолодание
Цунами высотой 20 метров обрушилось на Европу, а потом настала зима длиной в 200 дней в году....

Не НЛО, не спутник: почему правительство Колумбии так хочет заполучить этот объект?
Эксперты говорят, что это одна из самых больших сенсаций за последнее время....

В 12350 году до н.э. на Земле произошел настоящий апокалипсис
Если бы эта солнечная буря случилась сейчас, то количество жертв составило бы сотни миллионов человек....

Ученые практически коснулись марсианской воды
Новейшее исследование открывает сенсационные подробности....

Ученые хотят выращивать запасные человеческие тела
Биологи обещают, что не будут включать сознание в «запчастях»....