
Симулятор существ SoftZoo помогает сообща проектировать мягких роботов
Понятие «мягкая робототехника» стало общепринятым в 2008 году. Инженеры создают гибкие машины, полезные в разных сферах, от проникновения в труднодоступные места до реабилитации пациентов и решения задач в космосе. Один из источников вдохновения для создателей — животные в дикой природе.
Исследователи из Массачусетского технологического института (MIT) сделали ещё один шаг вперёд, разработав платформу SoftZoo, вдохновлённую биологией. Программное обеспечение (ПО) полезно для совместного поиска и оптимизации дизайна: выбора формы будущего устройства, расположения «мышц», мягкости и прочности, а также способа управления. В SoftZoo тестируют оптимальные конфигурации и размеры для использования роботов в различных средах.
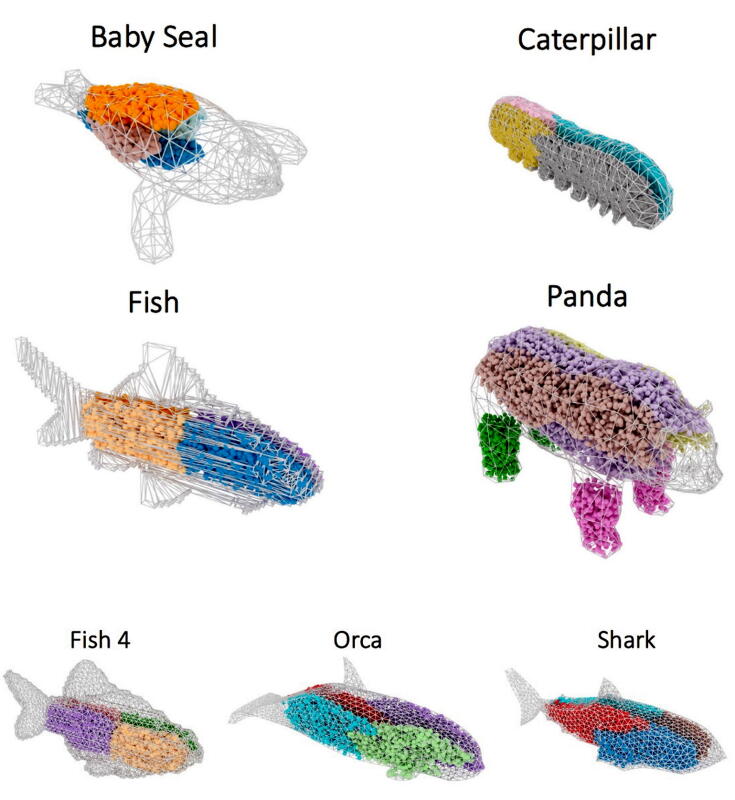
Платформа предлагает 3D-модели животных — панды, рыбы, акулы, гусеницы и другие — в качестве базовых форм. Условные животные могут имитировать задачи программной робототехники: передвижение, маневрирование и пути в различных средах. Платформа подбирает лучшую подвижность на снегу, в пустыне, по глине, в воде различной глубины и так далее.
— Цун-Суан Ван, аспирант MIT, лаборатория компьютерных наук и искусственного интеллекта (CSAIL).
SoftZoo имитирует движение, которое реагирует на физические особенности различных сред. Универсальный движок для физического моделирования позволяет одновременно моделировать и поворот детёныша тюленя на льду, и медленные поползновения по заболоченной местности существа типа гусеницы.
Изменчивость движка оптимизирует совместное проектирование, заменяя собой дорогостоящие симуляции. Причём пользователи могут перемещать виртуальных роботов с помощью более сложных алгоритмов.
Морфология, как раздел биологии, изучает формы, размеры и анатомию организмов. Биологические контуры могут послужить примером для более специализированной искусственной активности. Цун-Суан Ван привёл пример строения медузы, которая вдохновляет исследователей на разработку новых видов мягких роботов из силикона. А стрекозы могут выполнять очень быстрые манёвры благодаря строению крыльев, и так далее.
Ранее роботы с трудом ориентировались в сложных условиях, потому что их строение не соответствовало окружающей среде. И вот с SoftZoo дизайнеры могут развивать и интеллект, и устройство машин одновременно, чтобы они были более смышлёными и специализированными.
Соавтор исследования Чжуан Ган добавил, что SoftZoo предоставляет разработчикам программной робототехники симуляцию с открытым исходным кодом, помогая им проектировать роботов намного проще и гибче, одновременно повышая возможности передвижения машин в различных средах.
Директор CSAIL Даниэла Рус отметила, что вычислительный подход к совместному проектированию мягких роботов и их «мозга» в том числе, то есть контроллеров, открывает возможности для быстрого создания специализированных машин под конкретные задачи.
Прежде чем будет воплощён какой-либо робот, фреймворк мог бы заменить полевые испытания. Например, оценка того, как робот, похожий на медведя, ведёт себя в пустыне, может оказаться сложной задачей для разработчиков устройств для городской среды. А в SoftZoo инженеры могли бы сэкономить и время, и ресурсы.
В будущем разработчики платформы рассматривают варианты с механикой человека. Чтобы продемонстрировать этот потенциал, команда Вана разработала 3D-руку, бросающую снежок. Подключив имитацию человеческие задач, разработчики мягкой робототехники могли бы затем использовать платформу для оценки манипуляторов, которые захватывают, перемещают и складывают объекты.
Исследователи из Массачусетского технологического института (MIT) сделали ещё один шаг вперёд, разработав платформу SoftZoo, вдохновлённую биологией. Программное обеспечение (ПО) полезно для совместного поиска и оптимизации дизайна: выбора формы будущего устройства, расположения «мышц», мягкости и прочности, а также способа управления. В SoftZoo тестируют оптимальные конфигурации и размеры для использования роботов в различных средах.
Платформа предлагает 3D-модели животных — панды, рыбы, акулы, гусеницы и другие — в качестве базовых форм. Условные животные могут имитировать задачи программной робототехники: передвижение, маневрирование и пути в различных средах. Платформа подбирает лучшую подвижность на снегу, в пустыне, по глине, в воде различной глубины и так далее.
Наша платформа помогает пользователям находить наилучшую конфигурацию для робота и создавать алгоритмы для разных задач. По сути, она помогает понять наилучшие стратегии взаимодействия роботов с окружающей средой
— Цун-Суан Ван, аспирант MIT, лаборатория компьютерных наук и искусственного интеллекта (CSAIL).
SoftZoo имитирует движение, которое реагирует на физические особенности различных сред. Универсальный движок для физического моделирования позволяет одновременно моделировать и поворот детёныша тюленя на льду, и медленные поползновения по заболоченной местности существа типа гусеницы.
Изменчивость движка оптимизирует совместное проектирование, заменяя собой дорогостоящие симуляции. Причём пользователи могут перемещать виртуальных роботов с помощью более сложных алгоритмов.
Морфология, как раздел биологии, изучает формы, размеры и анатомию организмов. Биологические контуры могут послужить примером для более специализированной искусственной активности. Цун-Суан Ван привёл пример строения медузы, которая вдохновляет исследователей на разработку новых видов мягких роботов из силикона. А стрекозы могут выполнять очень быстрые манёвры благодаря строению крыльев, и так далее.
Ранее роботы с трудом ориентировались в сложных условиях, потому что их строение не соответствовало окружающей среде. И вот с SoftZoo дизайнеры могут развивать и интеллект, и устройство машин одновременно, чтобы они были более смышлёными и специализированными.
Соавтор исследования Чжуан Ган добавил, что SoftZoo предоставляет разработчикам программной робототехники симуляцию с открытым исходным кодом, помогая им проектировать роботов намного проще и гибче, одновременно повышая возможности передвижения машин в различных средах.
Директор CSAIL Даниэла Рус отметила, что вычислительный подход к совместному проектированию мягких роботов и их «мозга» в том числе, то есть контроллеров, открывает возможности для быстрого создания специализированных машин под конкретные задачи.
Прежде чем будет воплощён какой-либо робот, фреймворк мог бы заменить полевые испытания. Например, оценка того, как робот, похожий на медведя, ведёт себя в пустыне, может оказаться сложной задачей для разработчиков устройств для городской среды. А в SoftZoo инженеры могли бы сэкономить и время, и ресурсы.
В будущем разработчики платформы рассматривают варианты с механикой человека. Чтобы продемонстрировать этот потенциал, команда Вана разработала 3D-руку, бросающую снежок. Подключив имитацию человеческие задач, разработчики мягкой робототехники могли бы затем использовать платформу для оценки манипуляторов, которые захватывают, перемещают и складывают объекты.
- Дмитрий Ладыгин
- openreview.net
Наши новостные каналы
Подписывайтесь и будьте в курсе свежих новостей и важнейших событиях дня.
Рекомендуем для вас

Ящик Пандоры открыт: ИИ-копия погибшего… выступила в Аризоне на суде
После этого убийца получил максимальный срок. Почему это крайне опасный прецедент?...

Ловцы тепла: археологи рассказали, как древние люди сумели пережить жуткое похолодание
Цунами высотой 20 метров обрушилось на Европу, а потом настала зима длиной в 200 дней в году....

Не НЛО, не спутник: почему правительство Колумбии так хочет заполучить этот объект?
Эксперты говорят, что это одна из самых больших сенсаций за последнее время....

В 12350 году до н.э. на Земле произошел настоящий апокалипсис
Если бы эта солнечная буря случилась сейчас, то количество жертв составило бы сотни миллионов человек....

Ученые практически коснулись марсианской воды
Новейшее исследование открывает сенсационные подробности....

Ученые хотят выращивать запасные человеческие тела
Биологи обещают, что не будут включать сознание в «запчастях»....